Page Not Found
Page not found. Your pixels are in another canvas.

A list of all the posts and pages found on the site. For you robots out there is an XML version available for digesting as well.
Page Not FoundPage not found. Your pixels are in another canvas. |
About meAbout me |
Page not in menuThis is a page not in th emain menu |
Future Blog PostThis post will show up by default. To disable scheduling of future posts, edit |
Blog Post number 4This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool. |
Blog Post number 3This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool. |
Blog Post number 2This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool. |
Blog Post number 1This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool. |
Portfolio item number 1Short description of portfolio item number 1 |
Portfolio item number 2Short description of portfolio item number 2 |
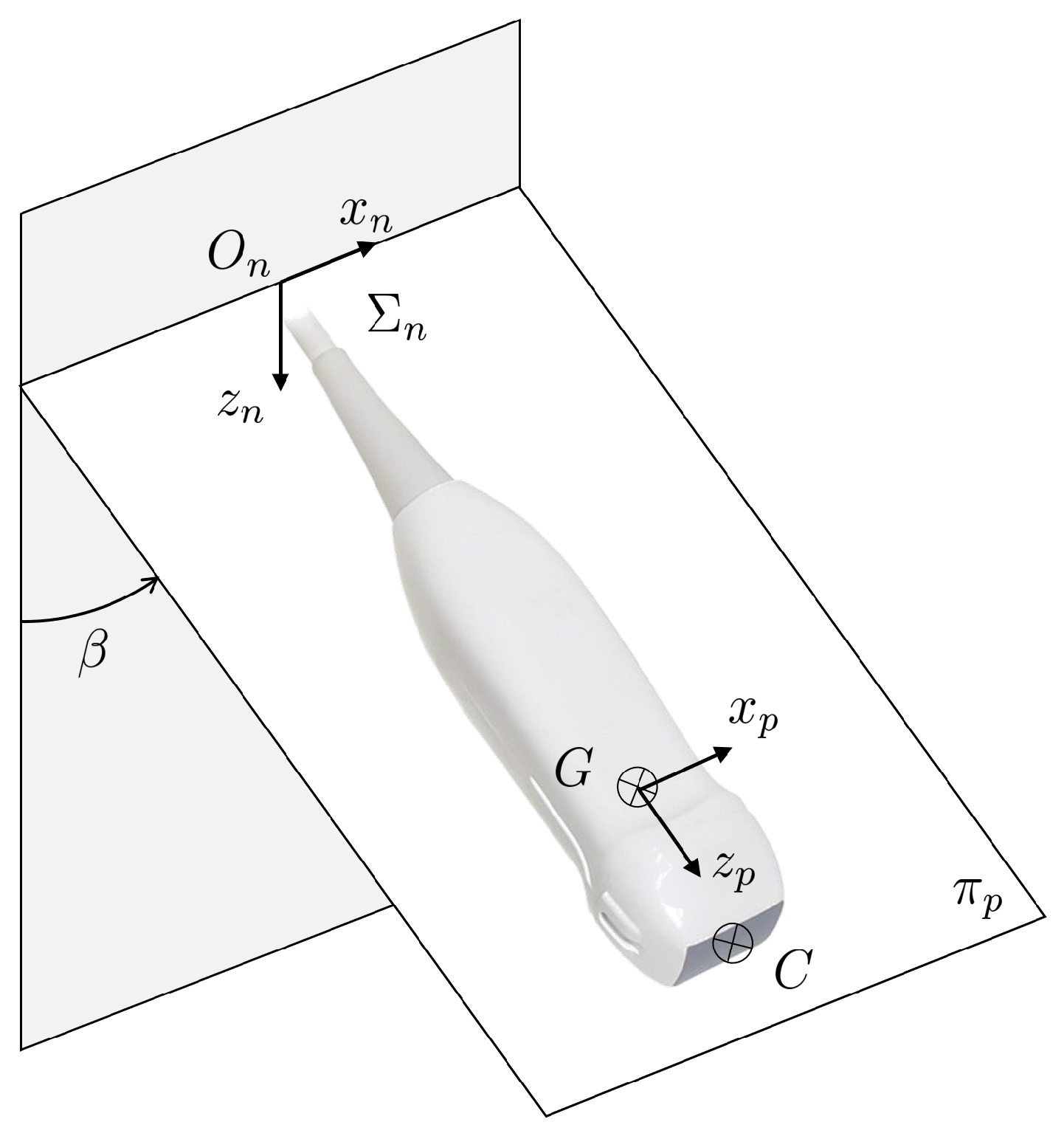
Kinematic optimization for the design of a collaborative robot end-effector for tele-echographyDesing and kinematic optimization of an end-effector for a COTS robotic arm (UR5), to guarantee optimal functionality during tele-operated ultrasonography. |
Adaptive Lane FollowingDesign of an Adaptive Controller to calibrate on the fly a scaled autonomous vehicle. |
Emergence of Cooperation with Stationary LeadersStudy on the factors that contribute to the emergence of cooperation, developing and testing an agent-based model based on game theoretical tenets. |
Fully Convolutional Place Recognition NetworkA novel solution to efficiently solve place recognition problem using only point-clouds. |
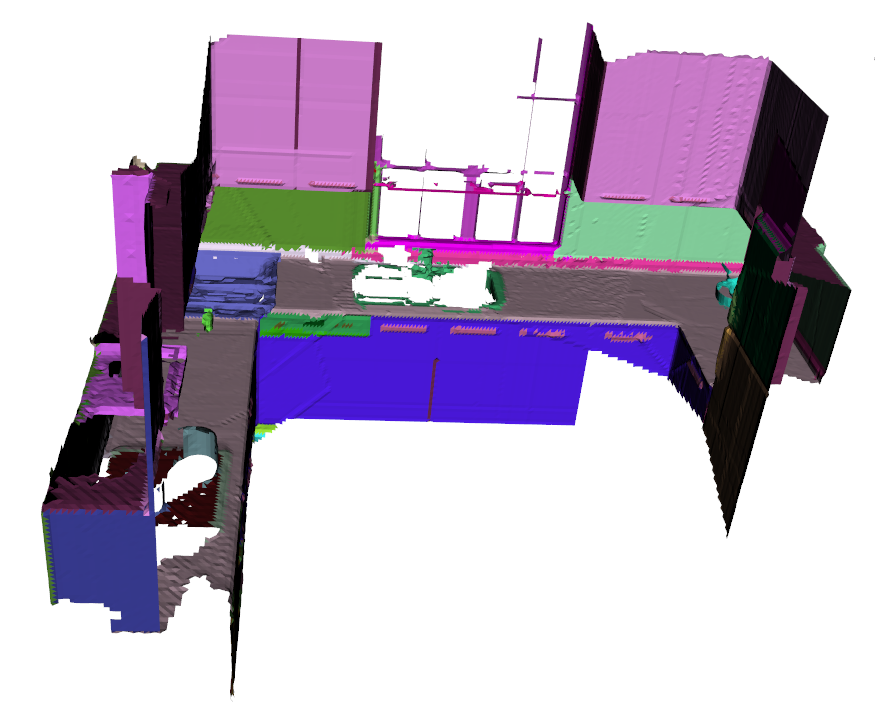
Object-Aware Active 3D PerceptionDesign of a novel object-aware Next Best View planner for a multi-object scenario, to autonomously generate scanning trajectory for reconstructing high quality object-level maps efficiently. |
Kinematic Optimization for the Design of a UR5 Robot End-Effector for Cardiac Tele-UltrasonographyPublished in The International Conference of IFToMM Italy 2020, 2020 Published: Robotic tele-examination is mainstream for solving the nowadays worsening shortage of physicians. However, many solutions are based on custom robotic arms, whereas using COTS arms could reduce costs and make such systems affordable. In this paper, we address the problem of the design of an end-effector for cardiac tele-ultrasonography, assuming the use of a popular and low-cost industrial robot such as the Universal Robot UR5. We use a kinematic optimization based on the manipulability measure taking into account the position of the robot base with respect to the patient, the number of degrees of freedom (DoFs), and the size of the end-effector. The constraints of the problem are the full inclusion of the examination area in the workspace and the possibility to orient the probe correctly. The results of this study show that, although the arm has 6 DoFs, an additive DoF of the end-effector improves the manipulability measure by more than 100% Recommended citation: P. Griffa, A. Filippeschi, C.A. Avizzano (2020). "Kinematic Optimization for the Design of a UR5 Robot End-Effector for Cardiac Tele-Ultrasonography." The International Conference of IFToMM ITALY, 2020. https://link.springer.com/chapter/10.1007/978-3-030-55807-9_48 |
Kinematic Optimization for the Design of a Collaborative Robot End-Effector for Tele-EchographyPublished in Robotics 10, 2021 Published: Tele-examination based on robotic technologies is a promising solution to solve the current worsening shortage of physicians. Echocardiography is among the examinations that would benefit more from robotic solutions. However, most of the state-of-the-art solutions are based on the development of specific robotic arms, instead of exploiting COTS (commercial-off-the-shelf) arms to reduce costs and make such systems affordable. In this paper, we address this problem by studying the design of an end-effector for tele-echography to be mounted on two popular and low-cost collaborative robots, ie, the Universal Robot UR5, and the Franka Emika Panda. In the case of the UR5 robot, we investigate the possibility of adding a seventh rotational degree of freedom. The design is obtained by kinematic optimization, in which a manipulability measure is an objective function. The optimization domain includes the position of the patient with regards to the robot base and the pose of the end-effector frame. Constraints include the full coverage of the examination area, the possibility to orient the probe correctly, have the base of the robot far enough from the patient’s head, and a suitable distance from singularities. The results show that adding a degree of freedom improves manipulability by 65% and that adding a custom-designed actuated joint is better than adopting a native seven-degrees-freedom robot. Recommended citation: A. Filippeschi, P. Griffa, C.A. Avizzano (2021). "Kinematic Optimization for the Design of a Collaborative Robot End-Effector for Tele-Echography." Robotics 10 (1),8. https://www.mdpi.com/2218-6581/10/1/8 |
Talk 1 on Relevant Topic in Your FieldThis is a description of your talk, which is a markdown files that can be all markdown-ified like any other post. Yay markdown! |
Conference Proceeding talk 3 on Relevant Topic in Your FieldThis is a description of your conference proceedings talk, note the different field in type. You can put anything in this field. |
Teaching experience 1Undergraduate course, University 1, Department, 2014 This is a description of a teaching experience. You can use markdown like any other post. |
Teaching experience 2Workshop, University 1, Department, 2015 This is a description of a teaching experience. You can use markdown like any other post. |